最近的随机过程作业涉及到了value iteration和policy iteration,于是就去搜了相关的网课CS229-lecture17来看,讲的很好,于是做了一些笔记。
由于这些东西和强化学习能扯上一点关系,所以就分类到了强化学习。
关于π和
π是optimal polocy,是一个state -> action 的映射
比如:
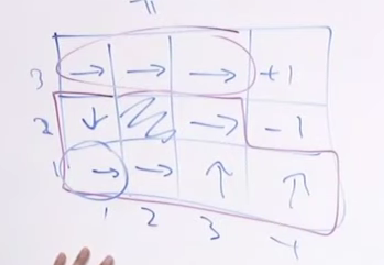
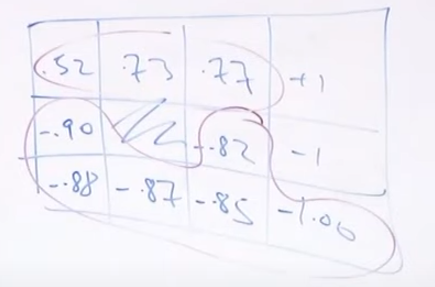
是 从某一个位置开始(当作初始位置) 所获得的一个 reward
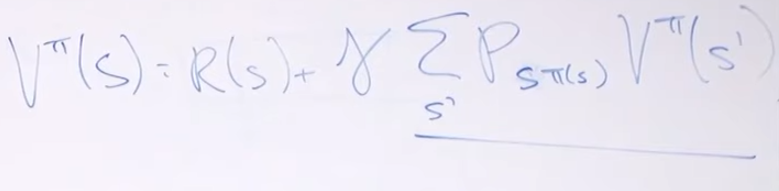
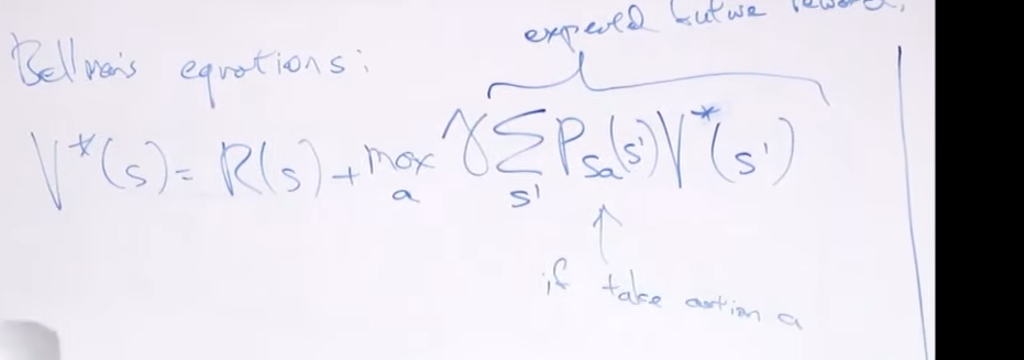
bellman equation
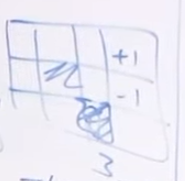
例子
比如说要求 (3,1) 这个位置的
那么求法就是:

如果把每一个状态对应的当作是一个未知数,由于已经给出了确定的policy (也就是说action是确定的),那么根据bellman equation,每一个都可以写出一个方程。所以可以用一个linear solver来构建方程并且求解。
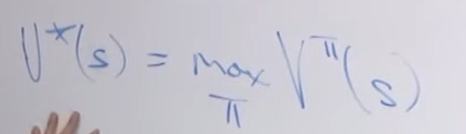
关于 和
是 optimal policy
是 optimal policy 对应的value function,公式如下:
对应的bellman equation
value iteration
由于V(s)直接存在相互依赖关系,value iteration有两种,一种是 synchrounous,就是每一个V(s)同步更新,另一种就是asynchrounous,就是V(s)的更新不同步。不过都差不多。
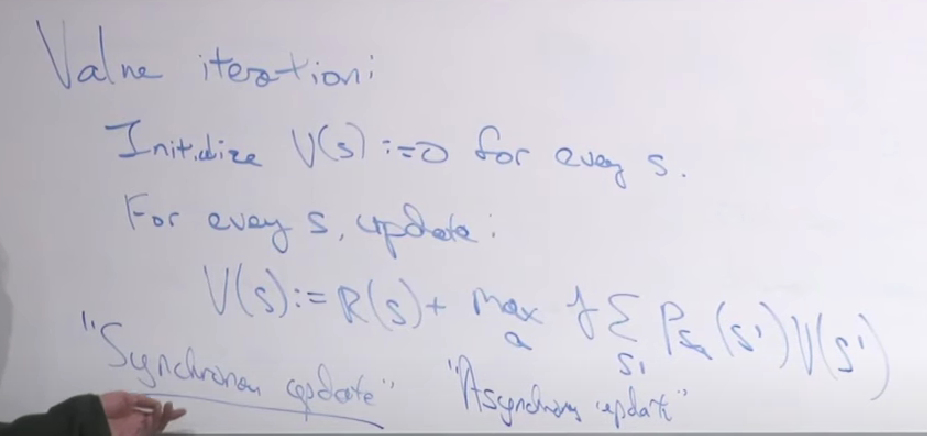
经过多次迭代,V就会很快收敛到V*。最后收敛完毕后,再去计算对应的 π(s) 。
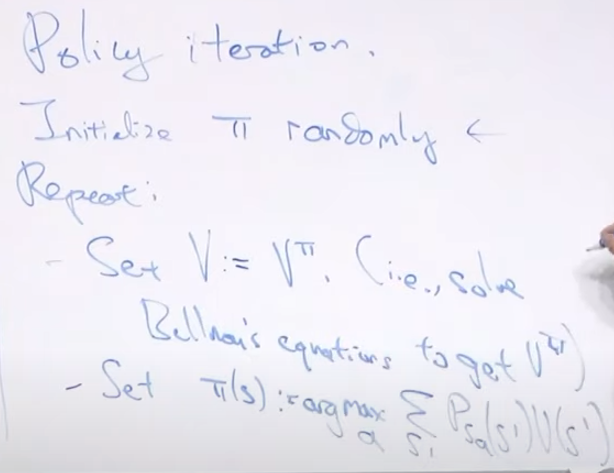
policy iteration
policy iteration的重点在于π,在循环中。
第一步:根据 π(s) 计算出对应的V。 如何计算? -> 如前面所述,使用linear solver来计算。
第二步:假设V是optimal value function,即V*,然后更新 π(s)。
pros and cons of two methods
由于policy iteration实际是一个 linear solver based 的 方法,所以当状态数很少时,求解速度很快,但是当状态数目很多时,求解速度就会变慢。所以在状态数目很多时,倾向于使用 value iteration。