Assignment1
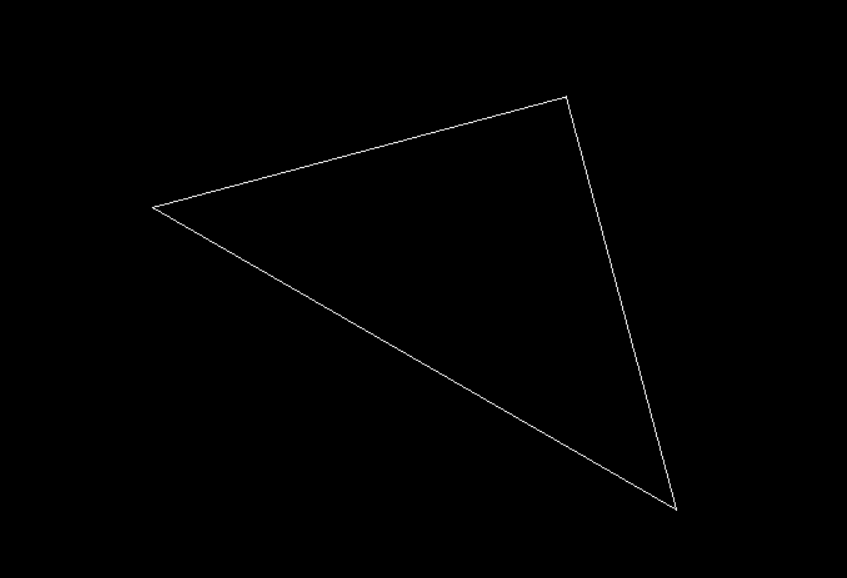
运行结果
关于三角形颠倒的解决方法,请见 结果出现上下颠倒,怎么办?只加一个负号即可 – 计算机图形学与混合现实研讨会 (games-cn.org)
实现细节
详细代码请见:详细代码
实现了main.cpp中的get_model_matrix, get_rotation, get_projection_matrix函数。
其中每一个的实现基本都能在下面的相关知识找到对应,无非就是把矩阵用代码写出来了而已。
这里记录一个需要注意的点,就是在get_projection_matrix函数中,在设置n和f(近平面和远平面)时,需要加一个负号:
float n = -zNear;
float f = -zFar;
相关知识
关于三维的变换
一般的旋转变换
旋转变换(一)旋转矩阵Frank的专栏-CSDN博客旋转变换矩阵
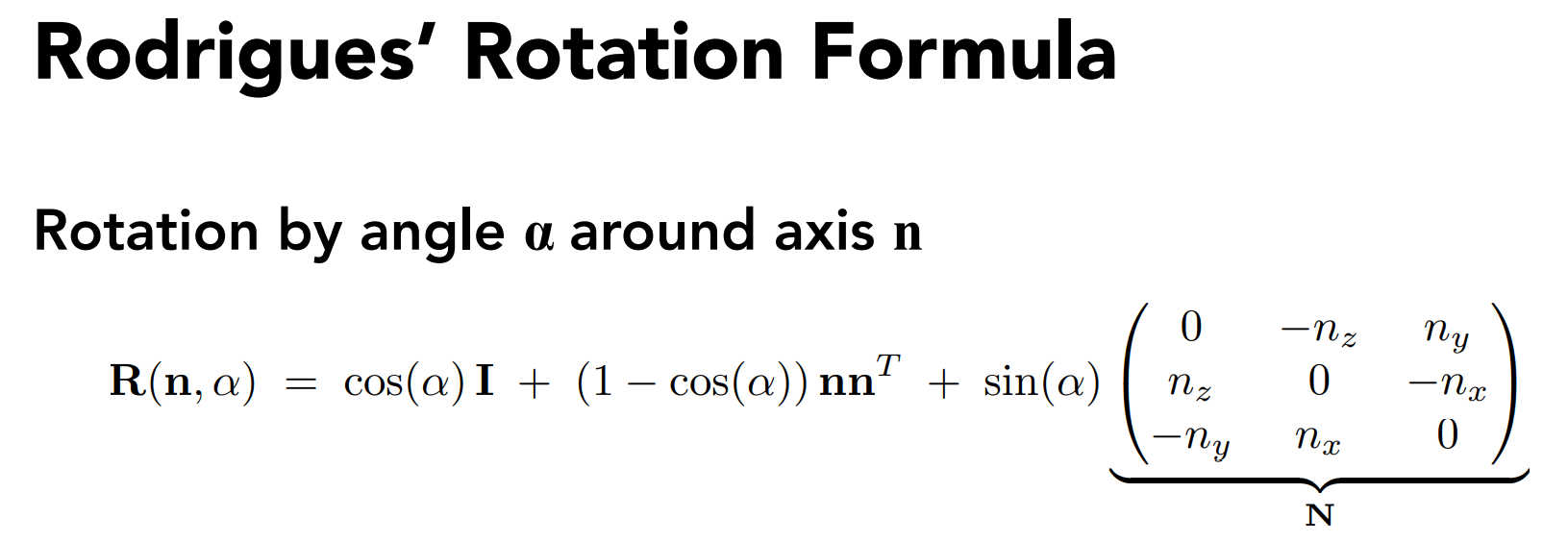
绕任意轴的旋转变换
MVP
M: Model transformation
模型变化,应该就是指模型的变化。包括平移、旋转、放缩等等操作。
在本次的作业中指的就是绕z轴旋转,这对应一个变换矩阵。
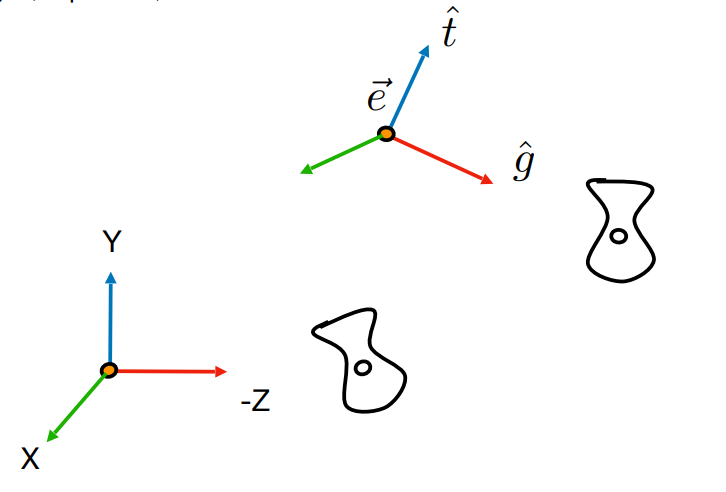
V: View transformation
视图变换,指的就是从相机出发观测物体,那么就需要将相机移动到原点,并且面朝-z方向,向上方向为y轴正方向。
将相机移动后,我们需要也对物体做一个移动,来保持相对位置不变。所以最后的结果就是,我们直接假定相机在原点,面朝-z方向,向上方向为y轴正方向,然后只对物体做这个变换就行了。
该变换分为两步:
这里我们把视图变换的矩阵令为 ,平移矩阵令为 ,旋转矩阵令为
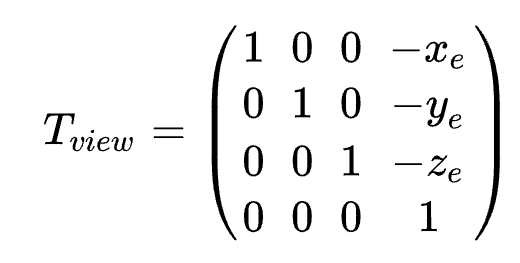
将相机移动到原点
平移矩阵为
将相机旋转到面朝-z方向,且上方为y正方向。
直接对 进行求解比较困难,所以我们转而去求它的逆变换,即将处于原点,面向-z,上朝y的相机旋转到当前的相机位置,用表示,那么有:
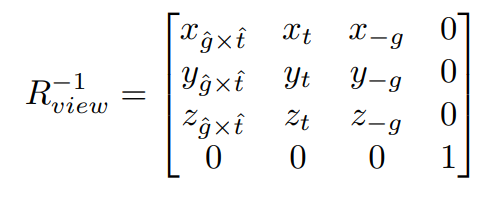
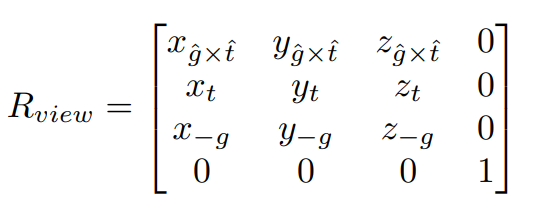
因为旋转矩阵是一个正交矩阵,所以矩阵的逆等于矩阵的转置,因此我们可以求得:
因为模型变换和视图变化都是在物体上进行变化,所以一般我们把他们一起叫做模型视图变换。
P:Perspective projection
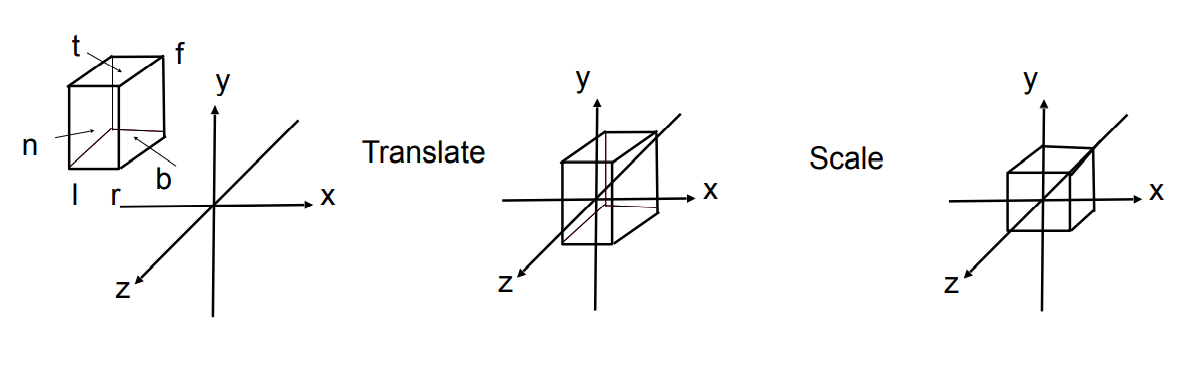
正交投影(Orthographic projection)
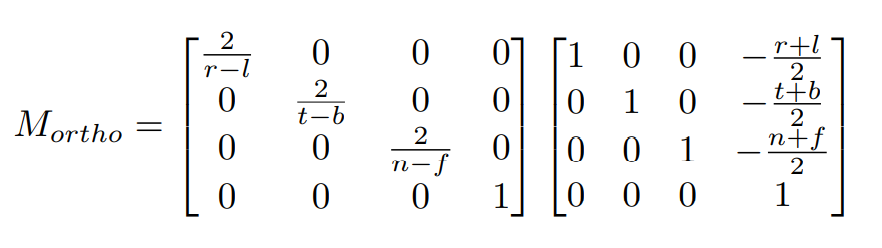
正交投影就是在空间中确定一个立方体 (用来表示相机的可视区域),对应六个面在不同坐标轴下的距离为right, left, top, bottom, near, far,要做的事情就是把这个立方体移动到原点,并且缩放到 (-1, 1)。
对应的矩阵 为:
透视投影(Perspective projection)
矩阵推导
透视投影就是将正交投影里面的一个立方体变成了一个forstum,我们要做的就是先将这个forstum "挤" 成一个立方体,然后后续操作就和正交投影一样了。

其中,透视投影变换矩阵为 ,我们只需要去求透视投影向正交投影的变换矩阵 即可

的求法比较发杂,下面贴一些图:
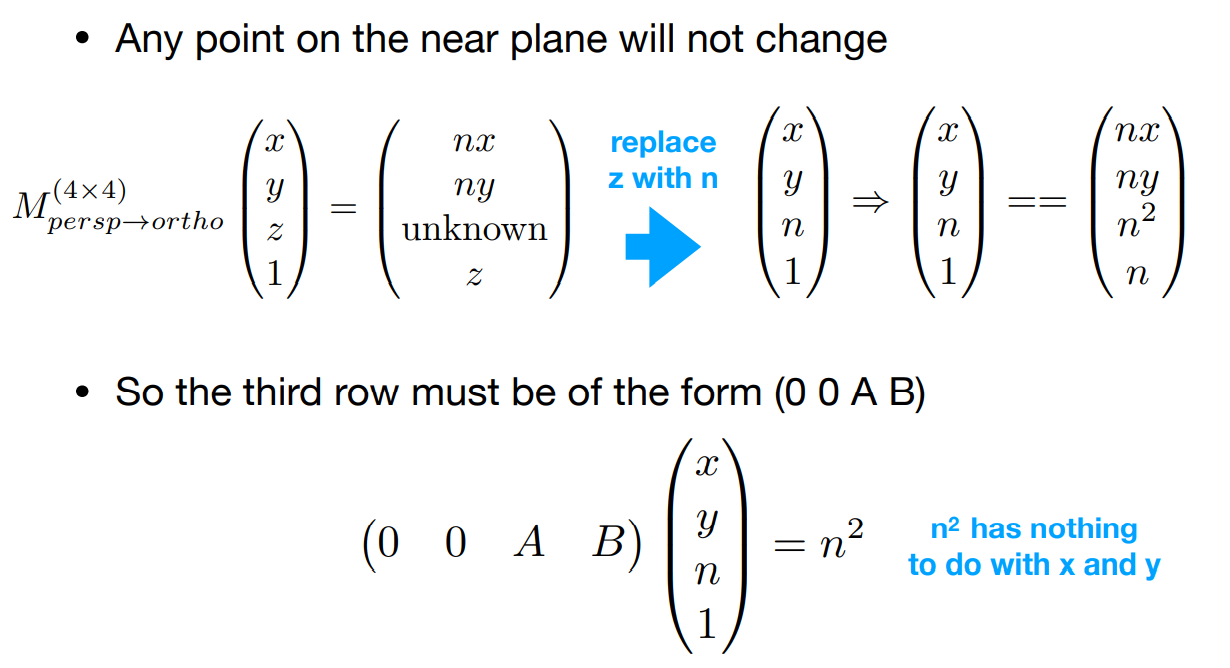
- 对于当 作用到(x,y,z,1)后,对于frostum里的每一个点,可以得到:
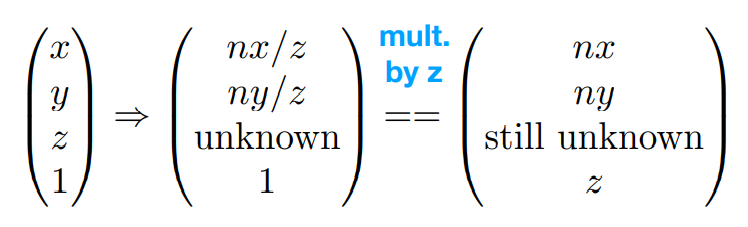
- 根据这个,我们已经可以得出矩阵中的大部分元素
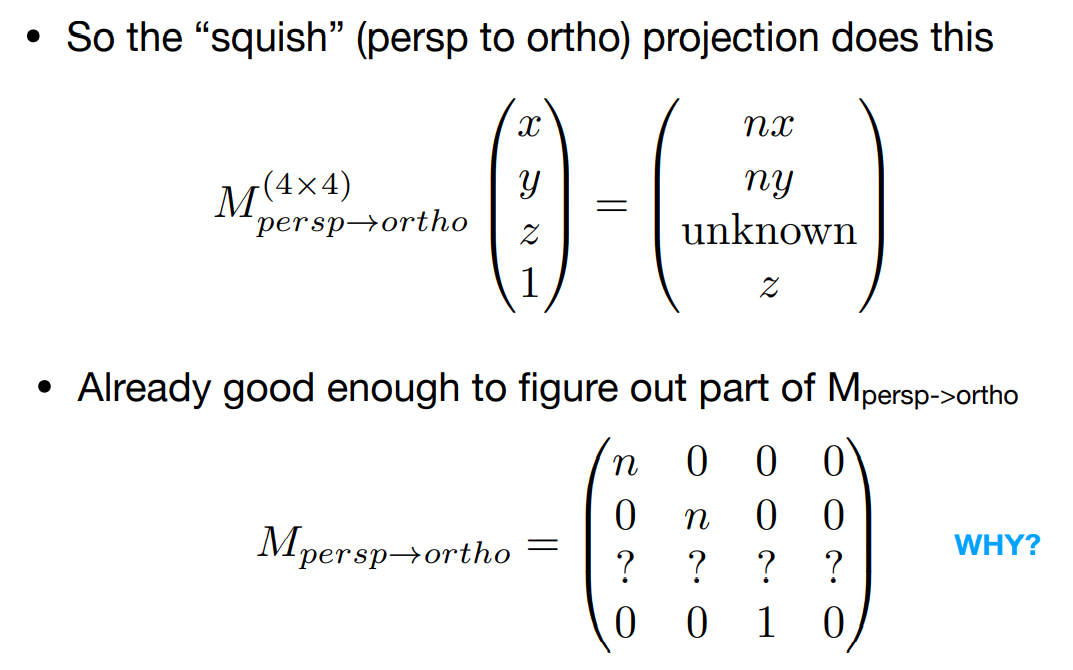
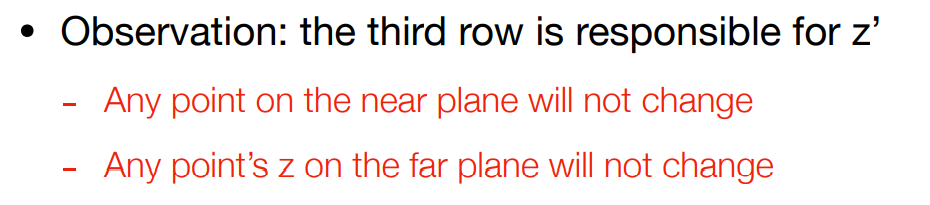
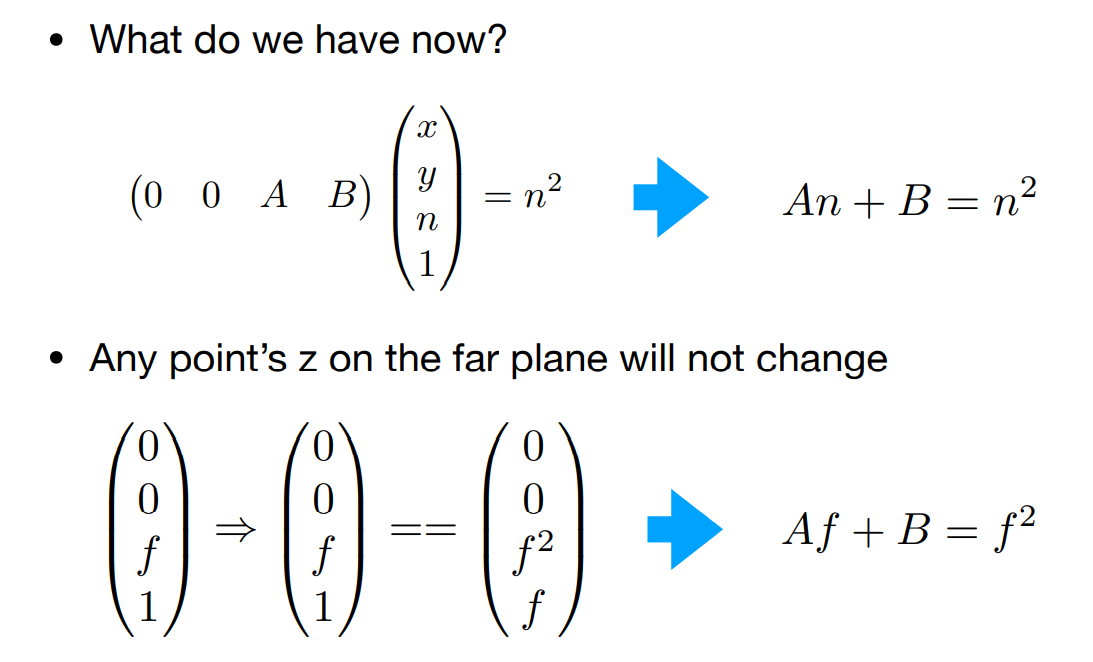
- 再根据下面标红的两个发现(近平面的点不会变,远平面的z不会变)列出公式,求解最后剩余的?
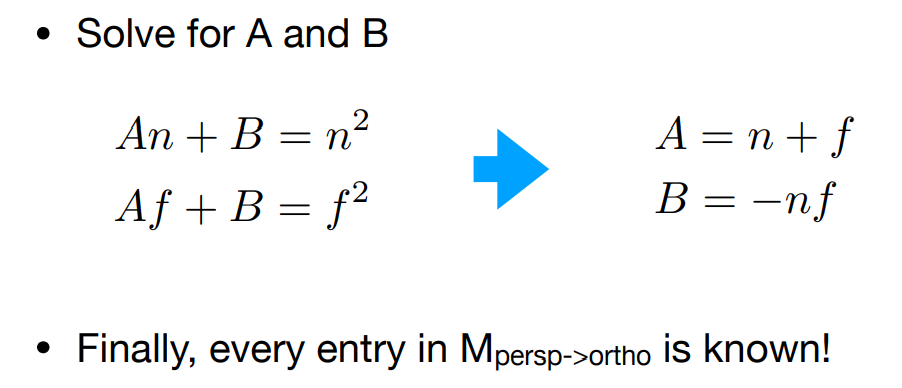
于是就求解得到 了。
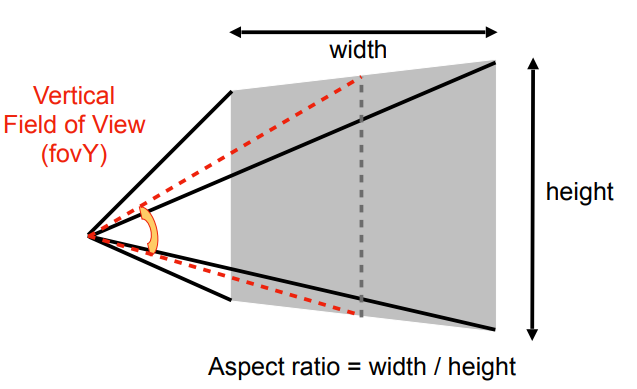
fov与aspect ratio
fov是(field of view),即竖直方向的可视角度
aspect ratio是width/height
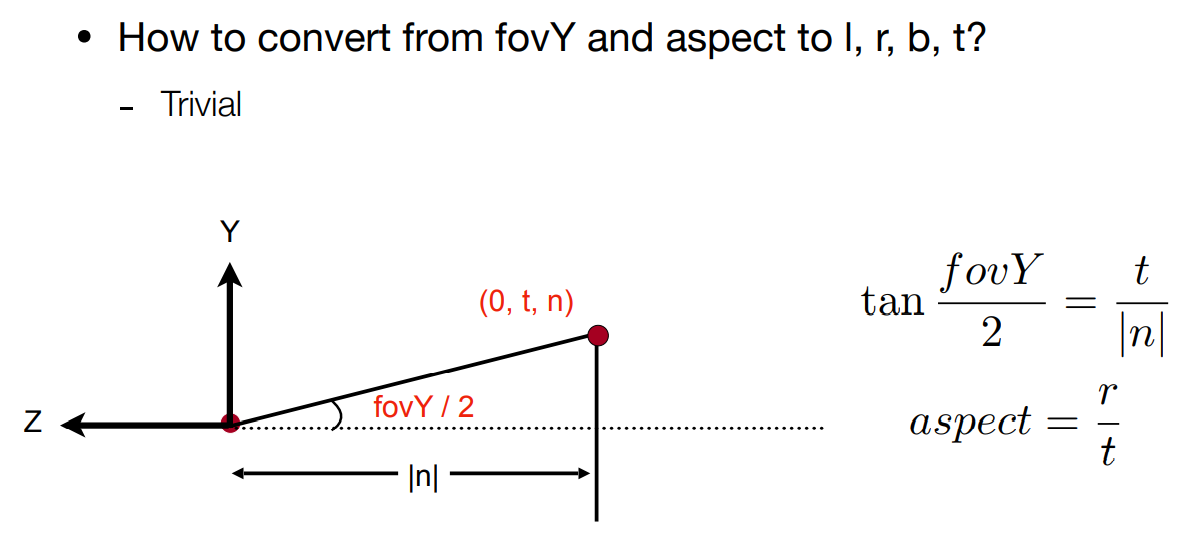
只需要使用fov和aspect ratio就可以用来表示一个透视投影(n和f是给定的,所以我们再把fov和aspect ratio转换为l, r, b, t即可)